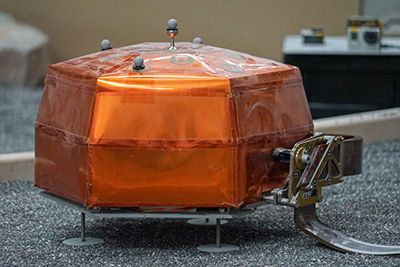
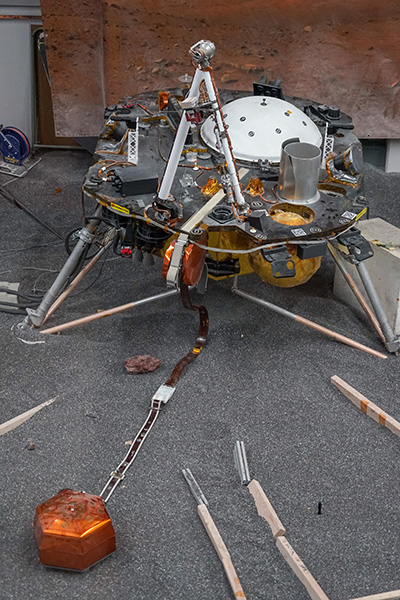
Le secteur de dépose des instruments d’InSight a été reproduit sur Terre
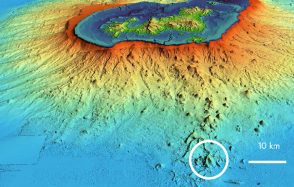
Peu après son atterrissage le 26 novembre dernier, la sonde InSight a commencé à cartographier en détails les quelques m2 du terrain orienté vers le sud et situé juste devant le bras robotique, qui va servir au déploiement de ses deux principaux instruments.
Date de publication : 15/12/2018
Grand Public, Observatoires, Presse, Recherche
Observatoires liés : Observatoire InSight
Thèmes liés : Intérieurs de la Terre et des planètes

Dernières actualités